L'intelligence d'un robot
Les tâches que le ou les processeurs d'un robot doivent accomplir se situent à plusieurs niveaux.
1- Au niveau machine, le processeur doit être en mesure d'analyser les données qui lui viennent des capteurs, en fonction par exemple des seuils, il doit donner aux actionneurs des commandes comptatibles avec leurs contraintes physiques, exemple un PID, et il doit gérer les différents canaux de communication.
2- Au niveau des primitives robotiques, le processeur doit coordonner les mouvements du robot en fonction de ses contraintes spécifiques, par exemple la limite des axes d'un bras, et en fonction des contraintes de son environnement, par exemple la vitesse d'un convoyeur.
3- Au niveau des tâches à accomplir, le processeur doit exécuter les différents processus de base, par exemple "saisir une pièce", séquentiellement ou simultanément selon les besoins, mais de toutes manières en temps réel.
4- Au niveau de la gestion du système, le processeur doit gérer la sécurité et prendre les dispositions qui s'imposent, il doit aviser l'opérateur de l'avancement des opérations et l'alerter d'un fonctionnement anormal, et enfin, il doit générer des compte-rendus.
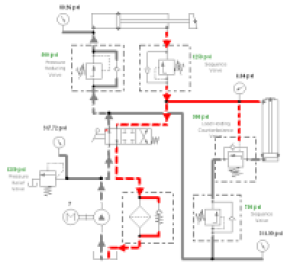
Illustration
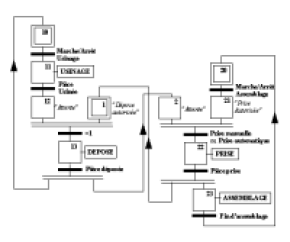
Grafcet
Automation Studio